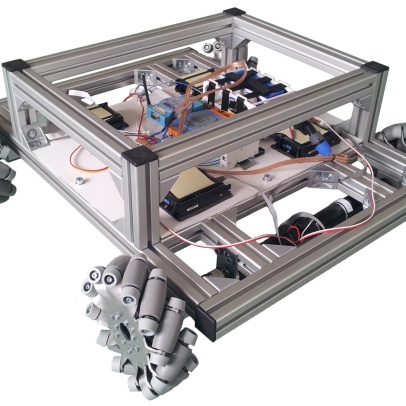
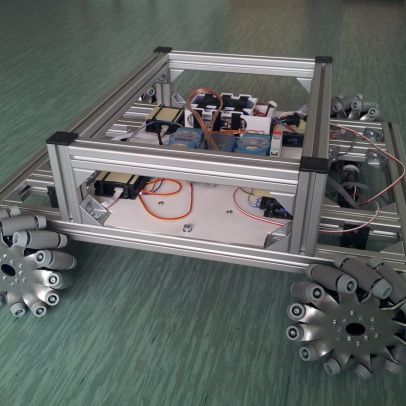
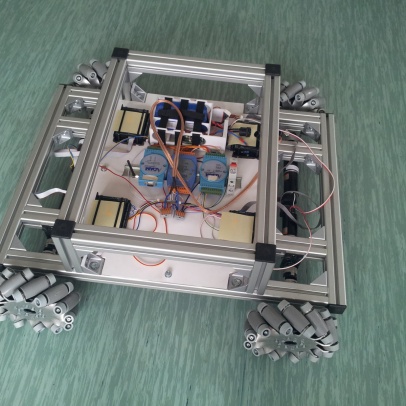
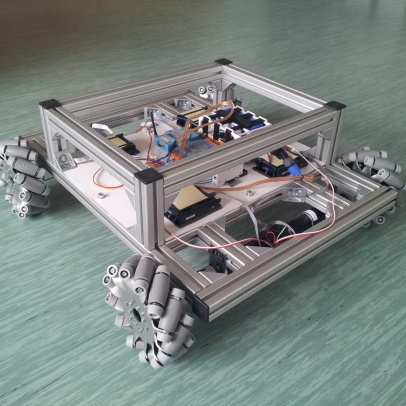
Tento mobilní robot byl navržen a realizován v diplomové práci studenta katedry jako testovací podvozek pro všesměrová kola.
Rám podvozku je tvořen hliníkovými profily, na rám je připevněna čtveřice pohonných jednotek (DC motor Maxon - převodovka - spojka - hřídel - všesměrové kolo) a deska pro uchycení elektroniky. Všesměrová kola jsou typu Mecanum (se šikmě uloženými válečky), výrobcem je firma AndyMark. Motory jsou řízeny jednotkami Maxon ESCON 50/5, přičemž analogové signály požadované rychlosti a digitální signály pro zapínání jednotek jsou generovány moduly ICP CON i7024 a ADAM 4050. Bezdrátová komunikace s řídicím počítačem je zajištěna dvojicí modulů ADAM 4550.
Řídicí aplikace běží na osobním počítači nebo notebooku se systémem Windows. Pomocí sady matematických výrazů je na základě požadovaného vektoru translačního pohybu robotu a vektoru rotace robotu kolem svislé osy vypočítávána čtveřice rychlostí (otáček) motorů jednotlivých kol. Vstupní hodnoty zadává operátor pomocí pákového ovladače typu gamepad, nebo je možno spustit pohyb po připravených trajektoriích (čtverec, kruh, vpřed/vzad, doprava/doleva atd.).
Základní technické údaje
- Rozměry: 800 x 750 x 315 mm
- Hmotnost: 45 kg