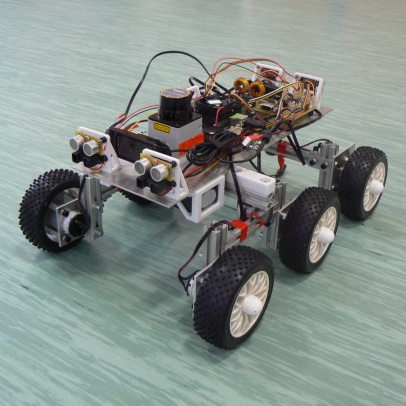
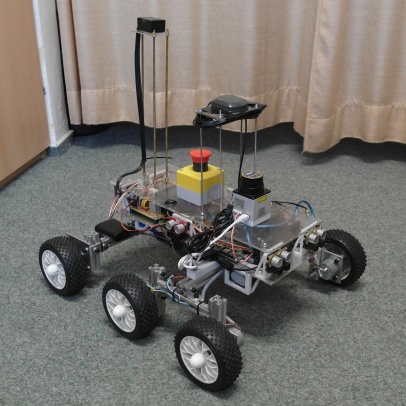
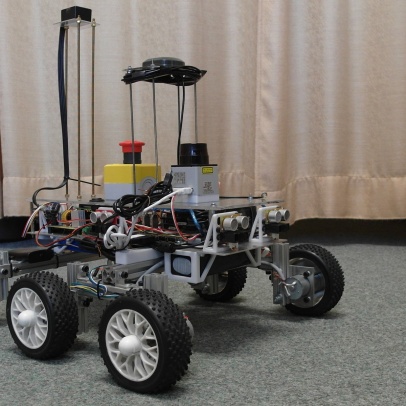
Tento mobilní robot je určen pro autonomní pohyb v terénu a byl vytvořen pro účast v soutěži RoboOrienteering. Konstrukční řešení podvozku je výsledkem bakalářské práce studenta katedry, na osazení elektronikou a senzory pracovali doktorandi.
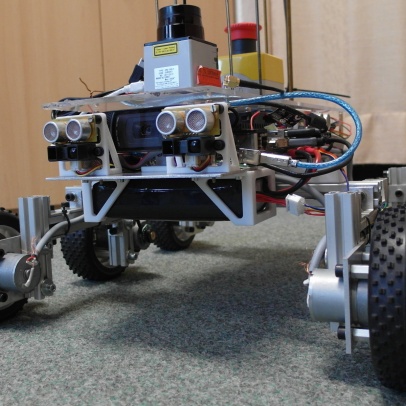
Robot je vybaven celkem 12 senzory vzdálenosti - 6 ultrazvukových a 6 infračervených, vždy 2 vpředu, 2 vzadu a po jednom na každém boku robotu. Na horní ploše je umístěn laserový scanner Hokuyo URG-04LX s úhlem záběru 240° a dosahem 4095 mm, dále pak GPS modul pro určení polohy robotu a elektronický kompas pro detekci absolutního natočení.
Robot je napájen pomocí systému dvou LiPol baterií, kde jedna slouží pouze pro napájení motorů a druhá pro počítač a senzory.
Řídicí systém se skládá z mini PC Kontron pITX-SP, na kterém běží systém Windows XP Embedded. O řízení motorů a čtení hodnot z analogových snímačů se stará mikroprocesor Atmel, který komunikuje s řídicím PC přes sériovou linku. Ostatní komponenty jsou do počítače připojeny přes USB sběrnici nebo I2C (ultrazvukové snímače a displej SIC2004A). Řídicí aplikace pracuje s mapovými podklady, na kterých jsou vyznačena místa se zvýšenou obtížnosti průjezdu. Ze získaných souřadnic polohy a cíle se pomocí mapových podkladů určí trasa cesty, ta je pak dále dle aktuální situace korigována pomocí senzorů. V oblasti blízké cílovému bodu se začne vyhledávat cílové místo pomocí analýzy obrazu z kamery.
Základní technické údaje
- Rozměry: 495 x 440 x 505 mm
- Hmotnost: 8 kg
- Senzory: elektronický kompas CMPS10, GPS modul Thales AC12, laserový scanner Hokuyo URG-04LX, 6 ultrazvukových snímačů SRF08, 6 IR snímačů Sharp, kamera Logitech C910